Original
|
As an assignment for my physics class, I was responsible for choosing any physics problem I wanted. I chose to research the Tinkertoy Walkers, developed at Cornell University by Michael Coleman, a mechanical engineer, and Andy Ruina, director of the Human Power, Biomechanics and Robotics Laboratory at Cornell University. The walkers are bipedal robots that walk down an incline using only the power of gravity. Originally based on research done by Tad McGeer now at the Insitu Group in Underwood, Washington, the walker could provide information useful in creating bipedal robots and improving artificial legs and rehabilitation. |
|
|
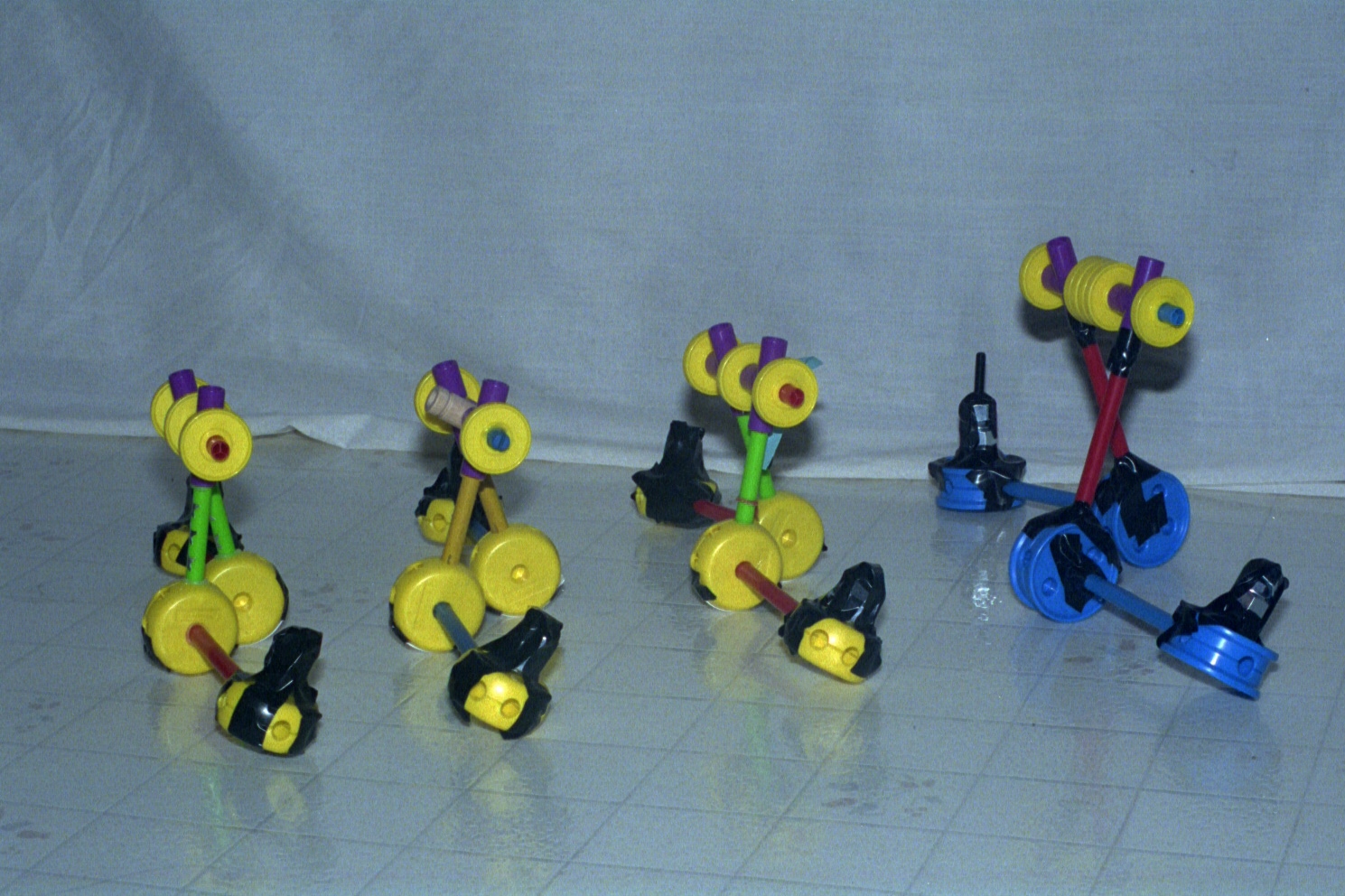
For my project, I attempted to build four versions of the Tinkertoy Walker: a copy of the original,
a walker using different materials, one with a different shape, and one that would walk down a ramp with a different slope.
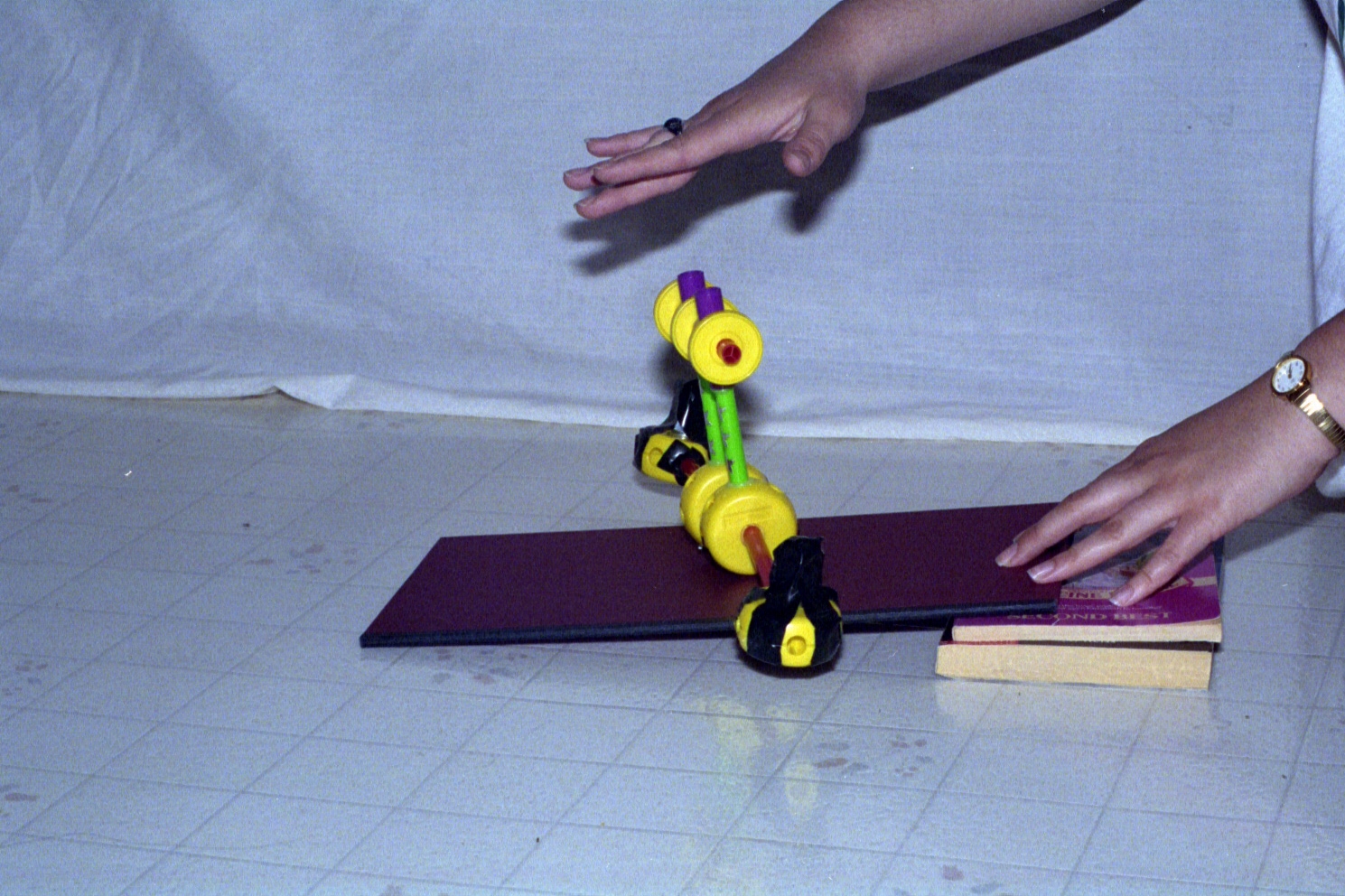
For my first walker, I used plastic Tinkertoys and followed the instructions found here. The walker is a bipedal robot that only uses gravity to walk. The hips are made of a red rod with two purple hinges. A washer on each end and between the hinges keep the legs, two light green rods, apart. A yellow spool is fitted parallel to the end of each green rod to serve as a foot, and a red rod with a perpendicular yellow spool is placed in the center hole of each foot to serve as a balance.
I intended my first walker to be as close to the original as possible. It only "walked" a few times, but there could be some reasons for that. First, I was unable to come up with the proper kind of brass strips to put on the bottom of the walker's feet. The purpose of the strips is to keep the walker from sliding down the ramp, so I made a substitute out of the sides of plastic margarine tubs. The plastic strips kept the walker from sliding, but may have made a weight difference. The other reason why the walker had difficulties walking is that I used a rather primitive ramp. I found some books of the proper height (1.1 inches) and I balanced a Scrabble board (14 inches long) on them. Since all of the walkers could walk a few steps only, I think my ramp may have been at fault. Back to Top

After making a copy of the original, I made three more models. I tried to see what was really neccessary for the successful operation of the walker, and how changes affected it. Since I had some wooden Tinkertoys, I figured making a hybrid plastic/wood walker should be a good way to test the materials. I made another copy of the original walker, but I replaced the red plastic rods with blue wooden rods, the middle washer was replaced with a wooden spacer, and the green legs were replaced with yellow wooden rods. The hinges, two washers, yellow spools, and weights stayed the same because there were no wooden pieces that corresponded well enough. Although this model did not walk as well as my copy of the original, it did walk a few steps. (Second from left in topmost picture) Back to Top This model needed to have a different shape or weight. The idea of enormous walkers stomping through the countryside amused me, so I attempted to make a bigger version of the walker. Each color rod in a set of Tinkertoys is about an inch smaller than the next size up, so I upgraded each rod to the next biggest length. The red rods upgraded to blue, the light green to red, and the yellow spools were replaced with blue spools. The hinges have no larger equivalent, so I used them again, and put four washers in between the legs instead of just one. I only had a few blue spools and wouldn't be able to recover after a mistake, so I taped the spools in place. Since the center hole of the blue spool goes all the way through the spool, I made hot-glue plugs and taped them over one end of the holes. That way, the blue spools only have holes as deep as the yellow spools. Using proportions, I figured out the weights needed. Unfortunately, the amount of weight needed was more than I could supply, plus the walker itself would not be able to support that kind of weight. So, I experimented with the weights I had to see if I could find a set that would balance the walker. By adding another large nut and screw to each side, the walker could walk a few steps. (walker farthest to the right in topmost picture) Back to Top This model is an exact copy of the original, but the weights are tilted at a different angle to allow it to walk down a ramp with a different slope. The original's weight tilt was 24 degrees, but I doubled it to 48 degrees. The ramp, then, had to have a tilt of 9 degrees instead of 4.5 degrees. I added an extra book to raise the ramp to 2.2 degrees high. The model walked jerkily, but it walked without any extra adjustment.(Second from right in topmost picture) Back to Top
Conclusion
From my observations, I conclude that using other materials or making other adjustments may prevent the walker from working perfectly.
Other than my margarine-tub discovery, none of my modifications seriously improved the models. Different materials or a proportionately
different slope do not adversely affect the model, but changes in the weight proportion will. Human error in measurement, adjustment, or the
building of the models themselves may explain wh none of the four models work perfectly. If you want to see the guys who actually made this work,
go to:
http://www.tam.cornell.edu/Ruina.html
|